





1,789 Views
Synopsis
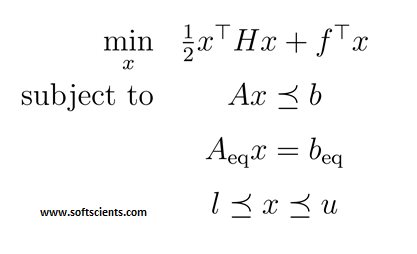
Note that xT denotes the transpose of x, and Ax < b means that the inequality is taken element-wise over the vectors Ax and b. The above objective function is convex if and only if H is positive- semidefinite. The quadprog function expects a problem of the above form, defined by the parameters fH; f; A; b; Aeq; beq; l; u; x0; H and f are required, the others are optional (empty matrix [])
General Formul
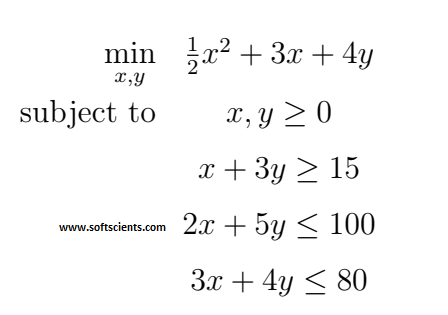
Example
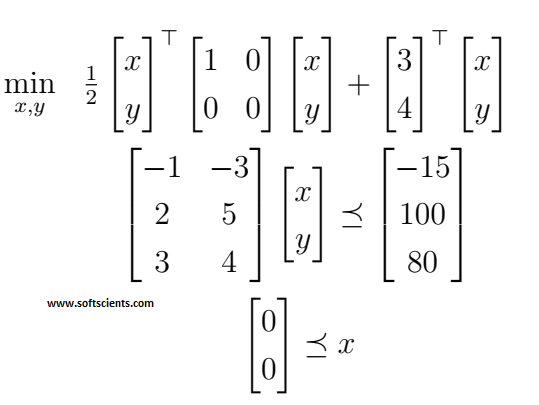
rewrite pattern above
Code in matlab
clc;clear all;close all;
H = diag([1; 0]);
f = [3; 4];
A = [-1 -3; 2 5; 3 4];
b = [-15; 100; 80];
l = zeros(2,1);
Aeq = [];
Beq = [];
u = [];
x0 = [];
options = optimset('Algorithm','interior-point-convex');
[x,fval] = quadprog(H,f,A,b,Aeq,Beq,l,u,x0,options);
Output
>> x
x =
0.0000
5.0000
>> fval
fval =
20.0000
>>
We can verify that x∗ = 0; y∗ = 5, with an optimal value 20.